
Clean Horsepower
by Lee Estingoy
Learn how brushless motors work
BRUSHLESS DC MOTORS are simple enough. Magnets attached to a shaft are pushed and pulled by electromagnetic fields that are managed by an ESC.
This differs from brushed (DC) motors, which use mechanical brushes rubbing on commutators to time and energize the magnetic fields. It is also different from alternating current (AC) motors, which generally use the cycle of the power itself to time the powering of the coils.
Brushless motors provide significantly higher power-to-weight ratios and much better efficiency than traditional brushed motors.
That’s the view from 40,000 feet, and it’s sufficient for most aeromodelers. However, a deeper understanding of brushless motors’ operation can go a long way toward helping a user select the right power system for an application.
Each discovery on this road will inevitably lead to more questions, but we have to start somewhere. Let’s begin with the basics of brushless-motor operation.
Inrunners and Outrunners
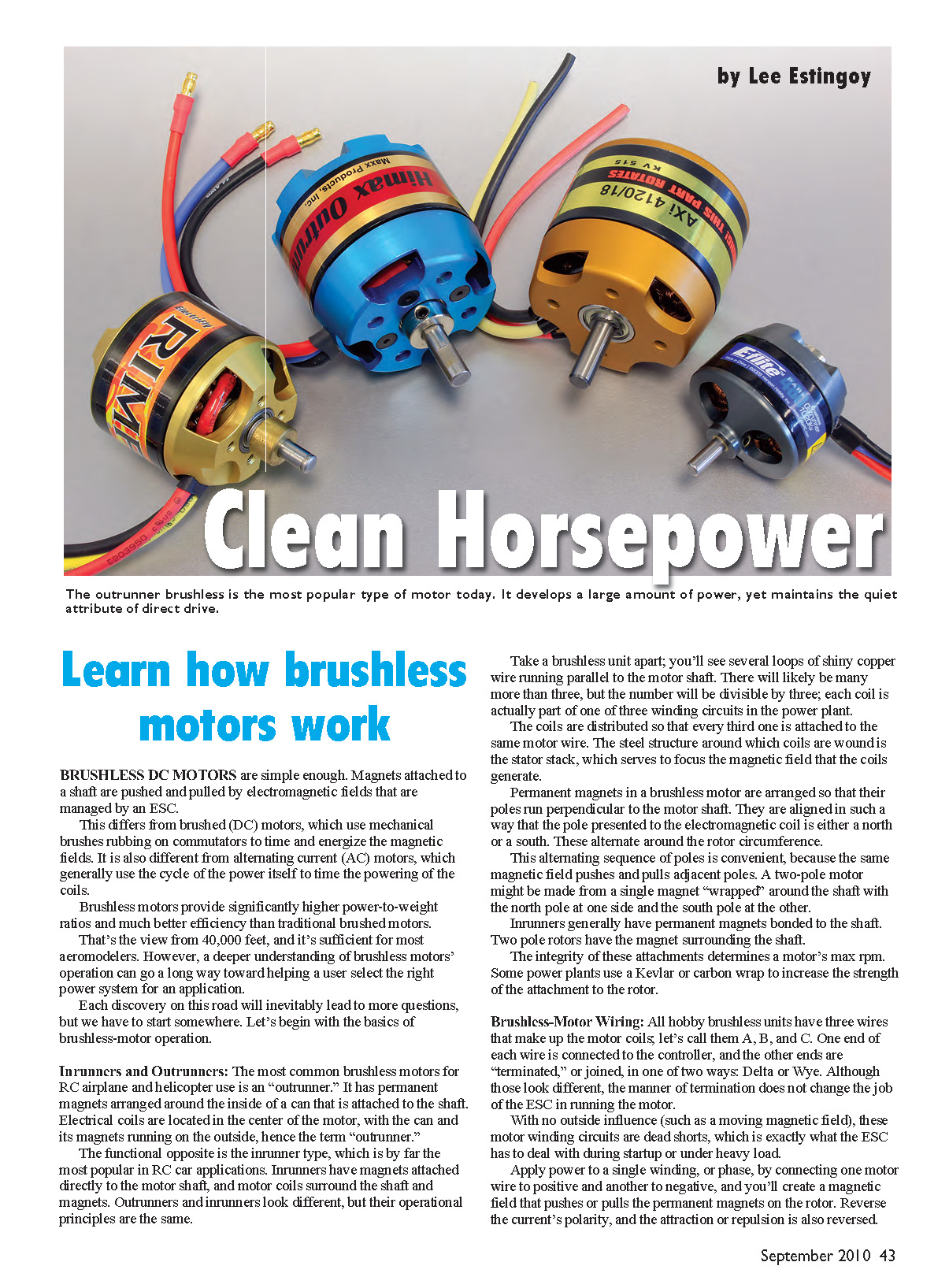
The most common brushless motors for RC airplane and helicopter use is an “outrunner.” It has permanent magnets arranged around the inside of a can that is attached to the shaft. Electrical coils are located in the center of the motor, with the can and its magnets running on the outside, hence the term “outrunner.”
The functional opposite is the inrunner type, which is by far the most popular in RC car applications. Inrunners have magnets attached directly to the motor shaft, and motor coils surround the shaft and magnets. Outrunners and inrunners look different, but their operational principles are the same.
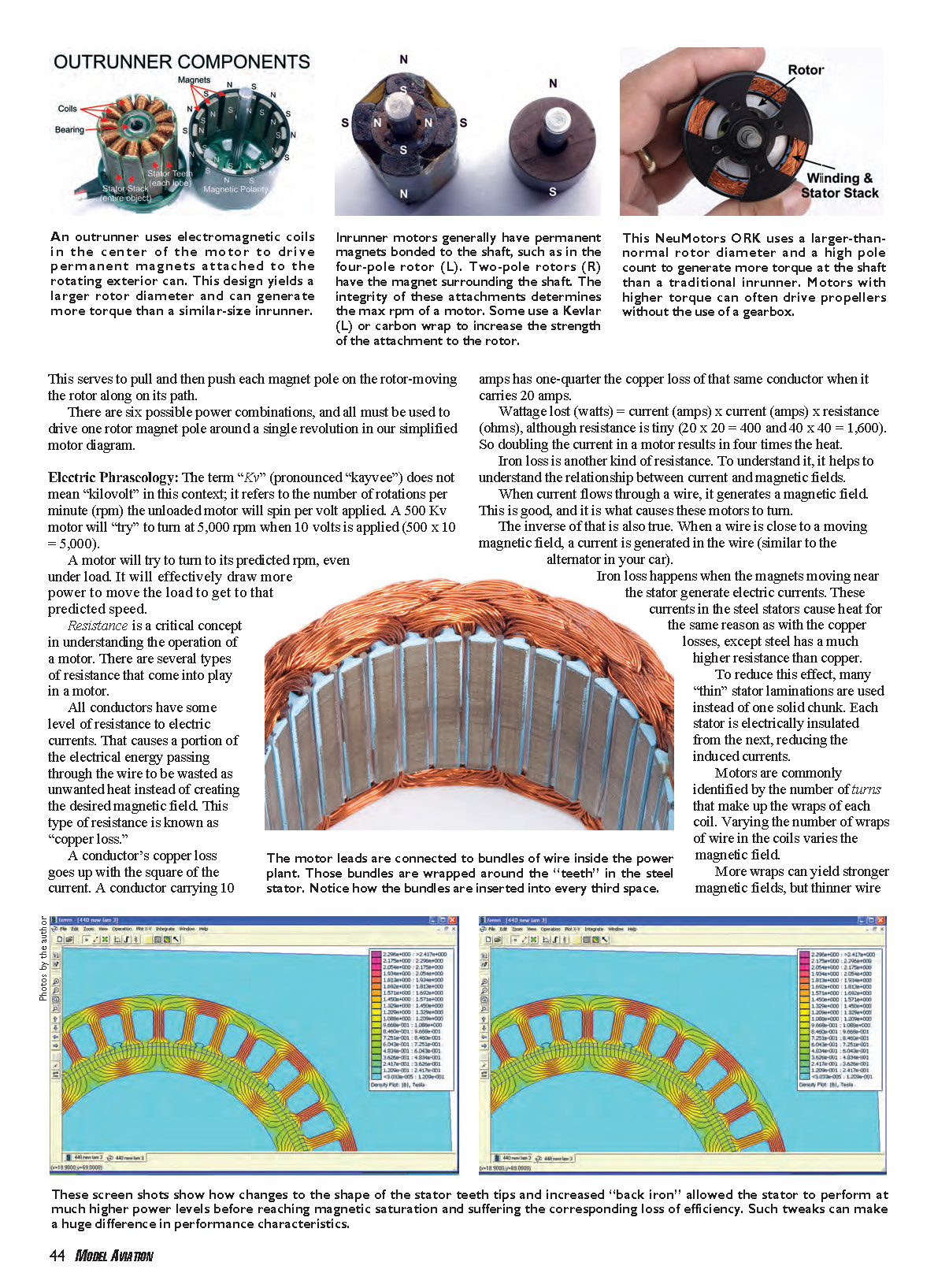
Take a brushless unit apart; you’ll see several loops of shiny copper wire running parallel to the motor shaft. There will likely be many more than three, but the number will be divisible by three; each coil is actually part of one of three winding circuits in the power plant. The coils are distributed so that every third one is attached to the same motor wire. The steel structure around which coils are wound is the stator stack, which serves to focus the magnetic field that the coils generate.
Permanent magnets in a brushless motor are arranged so that their poles run perpendicular to the motor shaft. They are aligned in such a way that the pole presented to the electromagnetic coil is either a north or a south. These alternate around the rotor circumference.
This alternating sequence of poles is convenient, because the same magnetic field pushes and pulls adjacent poles. A two-pole motor might be made from a single magnet “wrapped” around the shaft with the north pole at one side and the south pole at the other.
Inrunners generally have permanent magnets bonded to the shaft. Two-pole rotors have the magnet surrounding the shaft.
The integrity of these attachments determines a motor’s maximum rpm. Some power plants use a Kevlar or carbon wrap to increase the strength of the attachment to the rotor.
Brushless-Motor Wiring
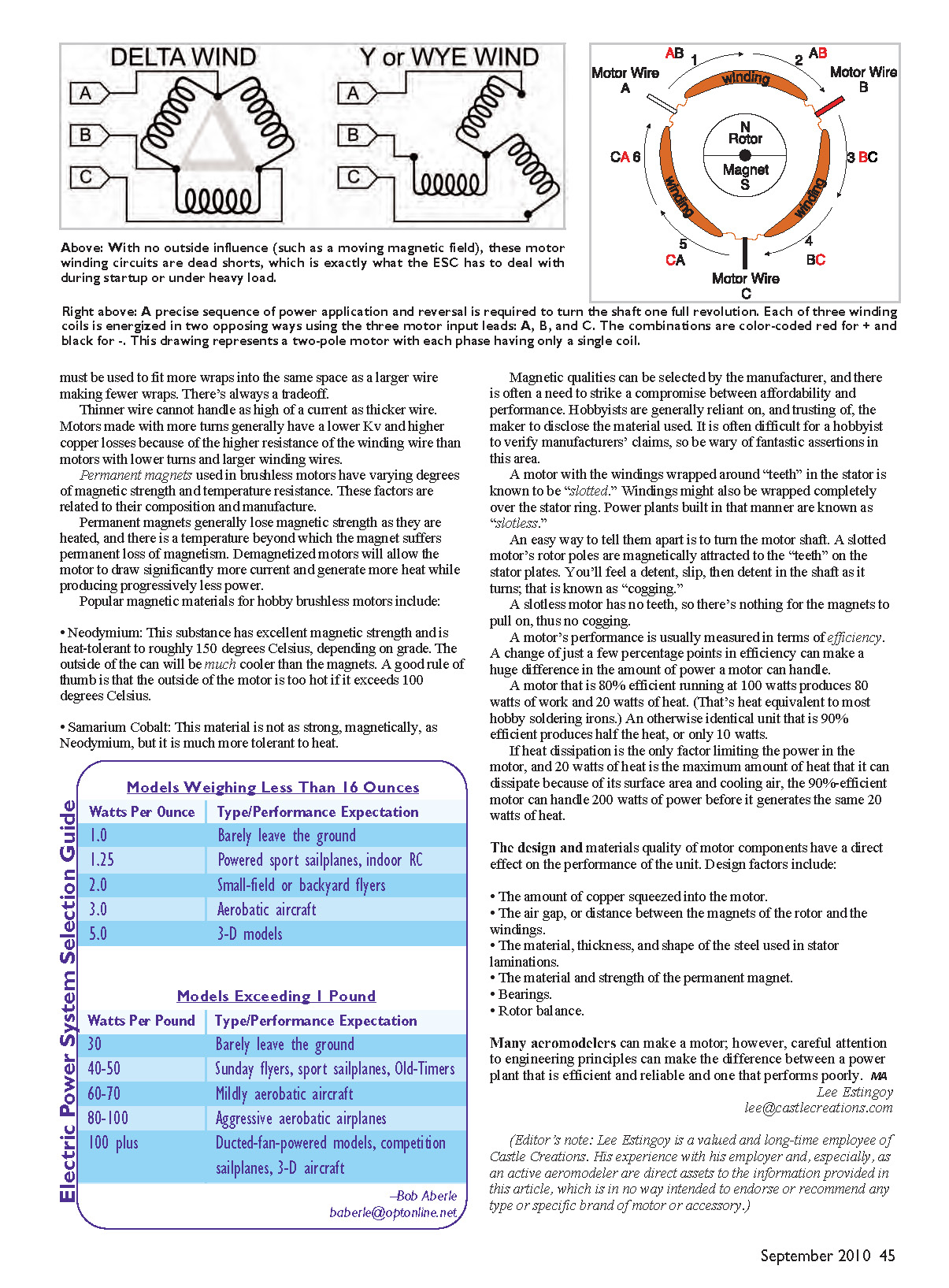
All hobby brushless units have three wires that make up the motor coils; let’s call them A, B, and C. One end of each wire is connected to the controller, and the other ends are “terminated,” or joined, in one of two ways: Delta or Wye. Although those look different, the manner of termination does not change the job of the ESC in running the motor.
With no outside influence (such as a moving magnetic field), these motor winding circuits are dead shorts, which is exactly what the ESC has to deal with during startup or under heavy load.
Apply power to a single winding, or phase, by connecting one motor wire to positive and another to negative, and you’ll create a magnetic field that pushes or pulls the permanent magnets on the rotor. Reverse the current’s polarity, and the attraction or repulsion is also reversed. This serves to pull and then push each magnet pole on the rotor, moving the rotor along on its path.
There are six possible power combinations, and all must be used to drive one rotor magnet pole around a single revolution in our simplified motor diagram.
Electric Phrasology
The term "Kv" (pronounced "kay-vee") does not mean "kilovolt" in this context; it refers to the number of rotations per minute (rpm) the unloaded motor will spin per volt applied. A 500 Kv motor will "try" to turn at 5,000 rpm when 10 volts is applied (500 x 10 = 5,000).
A motor will try to turn to its predicted rpm, even under load. It will effectively draw more power to move the load to get to that predicted speed.
Resistance is a critical concept in understanding the operation of a motor. There are several types of resistance that come into play in a motor.
All conductors have some level of resistance to electric currents. That causes a portion of the electrical energy passing through the wire to be wasted as unwanted heat instead of creating the desired magnetic field. This type of resistance is known as copper loss.
A conductor's copper loss goes up with the square of the current. A conductor carrying 10 amps has one-quarter the copper loss of that same conductor when it carries 20 amps.
Wattage lost (watts) = current (amps) x current (amps) x resistance (ohms). So doubling the current in a motor results in four times the heat (20 x 20 = 400 and 40 x 40 = 1,600).
Iron loss is another kind of resistance. To understand it, it helps to understand the relationship between current and magnetic fields.
When current flows through a wire, it generates a magnetic field. This is good, and it is what causes these motors to turn.
The inverse of that is also true. When a wire is close to a moving magnetic field, a current is generated in the wire (similar to the alternator in your car).
Iron loss happens when the magnets moving near the stator generate electric currents. These currents in the steel stators cause heat for the same reason as with the copper losses, except steel has a much higher resistance than copper.
To reduce this effect, many thin stator laminations are used instead of one solid chunk. Each stator lamination is electrically insulated from the next, reducing the induced currents.
Motors are commonly identified by the number of turns that make up the wraps of each coil. Varying the number of wraps of wire in the coils varies the magnetic field.
More wraps can yield stronger magnetic fields, but thinner wire must be used to fit more wraps into the same space as a larger wire making fewer wraps. There's always a tradeoff.
Thinner wire cannot handle as high a current as thicker wire. Motors made with more turns generally have a lower Kv and higher copper losses because of the higher resistance of the winding wire than motors with lower turns and larger winding wires.
Permanent magnets used in brushless motors have varying degrees of magnetic strength and temperature resistance. These factors are related to their composition and manufacture.
Permanent magnets generally lose magnetic strength as they are heated, and there is a temperature beyond which the magnet suffers permanent loss of magnetism. Demagnetized motors will allow the motor to draw significantly more current and generate more heat while producing progressively less power.
Popular magnetic materials for hobby brushless motors include:
- Neodymium: This substance has excellent magnetic strength and is heat-tolerant to roughly 150 degrees Celsius, depending on grade. The outside of the can will be much cooler than the magnets. A good rule of thumb is that the outside of the motor is too hot if it exceeds 100 degrees Celsius.
- Samarium Cobalt: This material is not as strong, magnetically, as Neodymium, but it is much more tolerant to heat.
Magnetic qualities can be selected by the manufacturer, and there is often a need to strike a compromise between affordability and performance. Hobbyists are generally reliant on, and trusting of, the maker to disclose the material used. It is often difficult for a hobbyist to verify manufacturers' claims, so be wary of fantastic assertions in this area.
A motor with the windings wrapped around "teeth" in the stator is known to be "slotted." Windings might also be wrapped completely over the stator ring. Power plants built in that manner are known as "slotless."
An easy way to tell them apart is to turn the motor shaft. A slotted motor's rotor poles are magnetically attracted to the "teeth" on the stator plates. You'll feel a detent, slip, then detent in the shaft as it turns; that is known as cogging.
A slotless motor has no teeth, so there's nothing for the magnets to pull on, thus no cogging.
A motor's performance is usually measured in terms of efficiency. A change of just a few percentage points in efficiency can make a huge difference in the amount of power a motor can handle.
A motor that is 80% efficient running at 100 watts produces 80 watts of work and 20 watts of heat. (That's heat equivalent to most hobby soldering irons.) An otherwise identical unit that is 90% efficient produces half the heat, or only 10 watts.
If heat dissipation is the only factor limiting the power in the motor, and 20 watts of heat is the maximum amount of heat that it can dissipate because of its surface area and cooling air, the 90%-efficient motor can handle 200 watts of power before it generates the same 20 watts of heat.
The design and materials quality of motor components have a direct effect on the performance of the unit. Design factors include:
- The amount of copper squeezed into the motor.
- The air gap, or distance between the magnets of the rotor and the windings.
- The material, thickness, and shape of the steel used in stator laminations.
- The material and strength of the permanent magnet.
- Bearings.
- Rotor balance.
Many aeromodelers can make a motor; however, careful attention to engineering principles can make the difference between a power plant that is efficient and reliable and one that performs poorly.
Lee Estingoy [email protected]
(Editor's note: Lee Estingoy is a valued and long-time employee of Castle Creations. His experience with his employer and, especially, as an active aeromodeler are direct assets to the information provided in this article, which is in no way intended to endorse or recommend any type or specific brand of motor or accessory.)
Transcribed from original scans by AI. Minor OCR errors may remain.

