

If It Flies ...
Dean Pappas | [email protected]
Are you cross-pollinating?
Hi, gang. In the last few columns I wrote about some selected aspects of glow power, eventually covering the traditional "2-4-2" CL Precision Aerobatics (Stunt) engine run. Check the film clips I mentioned in the December column.
As I wrote, subtly tweaking the engine's compression ratio, venturi size, nitro and oil content of the fuel, and even glow-plug heat range represents one of the high points of classical aeromodeling technique. Let's face it — that was downright clever!
This kind of "toy airplane lore" mustn't be allowed to pass into obscurity, and not because I expect that you'll use these techniques directly. You might never fly glow or maybe never fly CL (a shame, I think, either way), but it's important to know about different techniques, tricks, and methods used in other corners of the aeromodeling universe. Why? Cross-pollination.
When smart gardeners and farmers cross-pollinate plants or crops, they often get better, stronger ones. Aeromodeling is like that too.
I have an R/C flying buddy who has a neat flying-wing creation. It's fairly large and hard to grab for hand launch, not to mention glow-powered. After a dozen or so scary hand launches, a mutual flying buddy showed him how to build a wheeled dolly that would securely cradle the airplane until takeoff and then cleanly drop it off after it established a climb.
Where did he learn this? CL Speed! Those fliers' models have always taken off from a dolly and landed on skids. The Speed pilots have other tricks, but that's for another day.
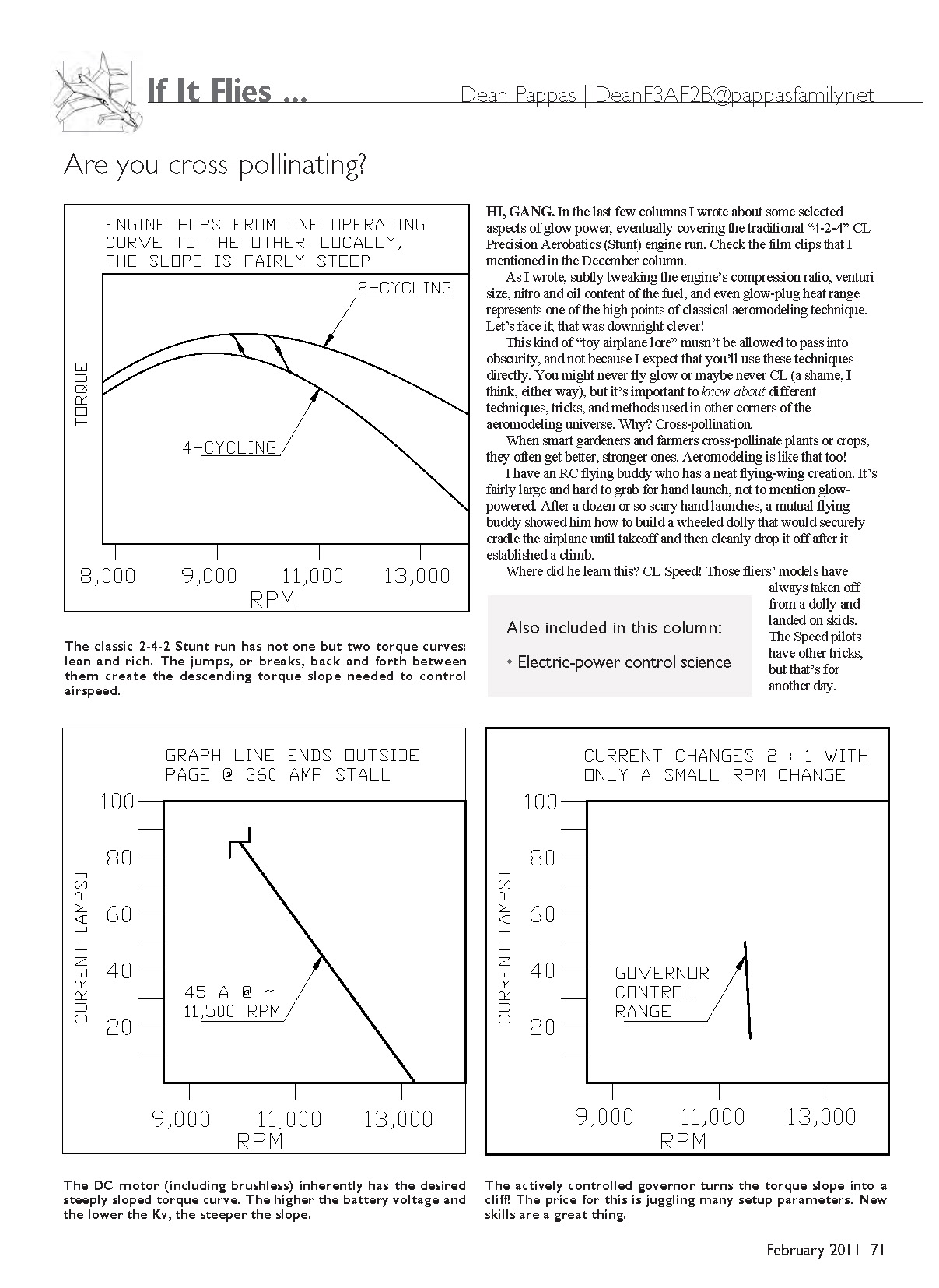
The classic 2-4-2 Stunt run has not one but two torque curves: lean and rich. The jumps, or breaks, back and forth between them create the descending torque slope needed to control airspeed.
The DC motor (including brushless) inherently has the desired steeply sloped torque curve. The higher the battery voltage and the lower the Kv, the steeper the slope. The actively controlled governor turns the torque slope into a cliff! The price for this is juggling many setup parameters. New skills are a great thing.
As I signed off last time, I mentioned that I needed to go back to working on the constant-rpm electric CL Stunt power plant.
Earlier in the development of electric CL, those of us trying to make e-power work encountered the greatest problem: as the battery voltage drops during flight, the airplane slows.
It might only be 5% or so, but this is enough to negatively affect the model; as it slows, the centrifugal force (yes, it's really centripetal force!) is reduced. This lowers the line tension and, as a result, control authority is reduced as well. It can even result in a total loss of control if the lines slacken.
Flying faster at the beginning of the flight is a poor compromise and isn't really an option. It's hard to fly precisely when the aircraft is going too fast, and the fast-paced maneuvers are unpleasant for the judges.
The solution to the problem is to use the helicopter head-speed governor that was designed into the speed controller. That's right — the feature that the ESC manufacturer put there for the helicopter crowd turned out to be useful in CL, of all things! It's another case of cross-pollination.
Even before we started using the rpm governor, the flying characteristics for e-Stunt were good when the battery voltage and speed were in the sweet spot. This was what made early pioneers in e-Stunt such as Mike Palko so optimistic about the possibilities.
What about e-power made this so? I think I can explain; the answer lies in the shape of the torque vs. rpm curve of the motor. It's actually a straight line, but let's explore this.
While we are at it, we can compare it to the shape of the torque curve that produces the 2-4-2 break that I covered in the previous column, as well as to that of the governed motor. That one is surprising.
All Wet: keeping historical order
First we have the classic break, which isn't a single torque curve but two. The engine effectively hops between them, creating a region where the torque vs. rpm curve is steeper than normal.
The steepness of the downward-sloping torque vs. rising rpm is what keeps the flying speed more or less constant through the climbs and dives of the maneuvers. The unfortunate thing about this system is that the hop back and forth has some hysteresis, or lag. You can see this in the back-and-forth curves, with arrowheads indicating the direction of the "breaks."
The peak rpm in a dive and lowest, or valley, rpm in a climb can differ by as much as 2,000 rpm. Still, it was the best we had for a long time. Although they operate similarly, modern tuned-pipe setups reduce this rpm band to roughly a 500–1,000 rpm difference, with noticeably less lag.
Electric run like an R/Cer
Next comes the ungoverned electric setup. We will dwell on this for a bit, because it explains a lot about the nature of motors, including R/C setups.
For those of us who spent eons running internal-combustion engines, rpm was synonymous with horsepower. Motors have turned this upside-down. Assuming a nominally constant battery voltage and full throttle, the torque and power increase as the load posed by the propeller increases.
The motor-speed constant Kv has the units of rpm per volt. The less familiar torque constant describes the torque you get from the motor in proportion to the current.
- Torque units: ounce-inch (or newton-meters).
- Torque constant Kt: units of ounce-inch per amp (or N·m per amp).
- Relationship: Kt = 1,352 / Kv (ounce-inch per amp).
- In SI units: Kt = 9.55 / Kv (N·m per amp).
This is true no matter how big or small the motor is. It's just that bigger motors can handle more amperage before they malfunction or melt.
The torque vs. rpm curve is a straight, negatively sloped line, and maximum power results, in theory at least, when the load is so great that the motor is bogged down to exactly half of the no-load rpm. That is, half of Kv (in rpm per volt) multiplied by the battery voltage.
For the 920 Kv motor with a 4S Li-Poly battery mentioned earlier, this would be about 6,625 rpm at full throttle. That's a huge load that would overload the manufacturer's rated power-handling capacity by roughly a factor of three or four. In real life, motors tend to smoke and melt when loaded that hard.
At the no-load rpm there is no torque available, and only a minimal current is drawn.
In theory, if the motor were loaded down so hard that it "stalled" or stopped, the current would be incredibly high. How high? Divide the battery voltage by the sum of the motor winding resistance, ESC resistance, and the resistance of the beefy wiring.
A good estimate of these for the motor I have been using to fly a 40- or 45-size airplane would be maybe 40 milliohms. Take the 14.4 volts of the 4S battery I use, and the stall current would be about 360 amps.
As I mentioned, this is theoretical. If saturation of the magnetic core materials in the motor didn't prevent it from drawing these currents, the rapid melting would!
At a sensible current such as 45 amps, the torque would be roughly 66 ounce-inch. That compares favorably with a muffled .40 set a bit rich. The slope of torque vs. rpm is dictated by the Kv and the battery voltage. It's that simple.
The steeper the slope the better when it comes to maintaining airspeed without having to change the throttle. That's why we ran at full throttle with a very low-pitch propeller. If I remember correctly, it was less than 4 inches of pitch.
This fixed-throttle approach results in peak and valley rpm differences of maybe 1,000, depending on the quality of the battery. Remember that as the model speeds up and the propeller turns faster, the current and power that the motor draws falls off. And if the airplane slows in a climb, the motor will draw more power from the battery.
The governor arrives!
The helicopter-style rpm governor changes the throttle in an attempt to maintain constant rpm. The slope of the governed graph is nearly vertical, and how close it is to that vertical is dictated by the gain setting of the ESC.
With some ESCs the gain and response time are adjustable, and e-Stunt experimenters are still discussing the best way to set them. The highest gain settings result in peak and valley rpm differences of roughly 100 rpm, while more modest settings are able to maintain rpm within 300–400 rpm without much fuss.
The development that has me tied up these days is the struggle to make the governor control loop react as fast as possible while maintaining high gain. The trick is to avoid the governor becoming too reactive. If the control loop starts to chase its own tail, or oscillate, that leads to other problems.
It's a whole new frontier. I hope you found it interesting. Until next time, have fun and do take care of yourself.
MA
Transcribed from original scans by AI. Minor OCR errors may remain.

