


Minicopter Diabolo blows away the competition
by Mark Fadely [email protected]
Specifications
- Rotor diameter: 1.56 to 1.68 meters (blade length: 690 to 750 mm)
- Weight with 12s/5000: 4.8 to 5.2 kg (10.5 to 11.4 pounds)
- Two-stage gear, helical spur gear
- Gear ratio, first stage: 1:3.1 to 1:4.13; second stage: 1:3.17
- Belt-driven tailrotor with automatic tension control
- Tail gear ratio: 4.75:1
- Tail rotor diameter: 290 to 300 mm (11.4 to 11.8 inches)
- Length with canopy: 1.38 meters (54.3 inches)
- Height: 39 cm (15.3 inches)
- Landing gear width: 22 cm (8.66 inches)
- Tailboom diameter: 30 mm (1.18 inches)
- Battery tray: 68 (74) mm high, 64 mm wide
Introduction
Last year I had the privilege of bringing back the Speed runs to the IRCHA Jamboree, where we witnessed some brave pilots flying various exotic and common helicopters, different power schemes, head setups, and brands.
This was also the big debut for the new model coming from a well-established small company in Germany called Minicopter. The new 3-D speed offering was the Diabolo. How did it fare? It won.
The Diabolo is not a one-trick pony; it is a capable 3-D machine that delivers fantastic performance with head speeds as low as 1,600 rpm and mind-blowing aerobatics at higher head speeds. Attention to detail is evident in the smooth and efficient powertrain—encased in a rigid, simple, and lightweight structure—allowing this model to fly smoother and faster using less power than your average RC helicopter. You may think every 3-D helicopter boasts such claims these days. This one is different.
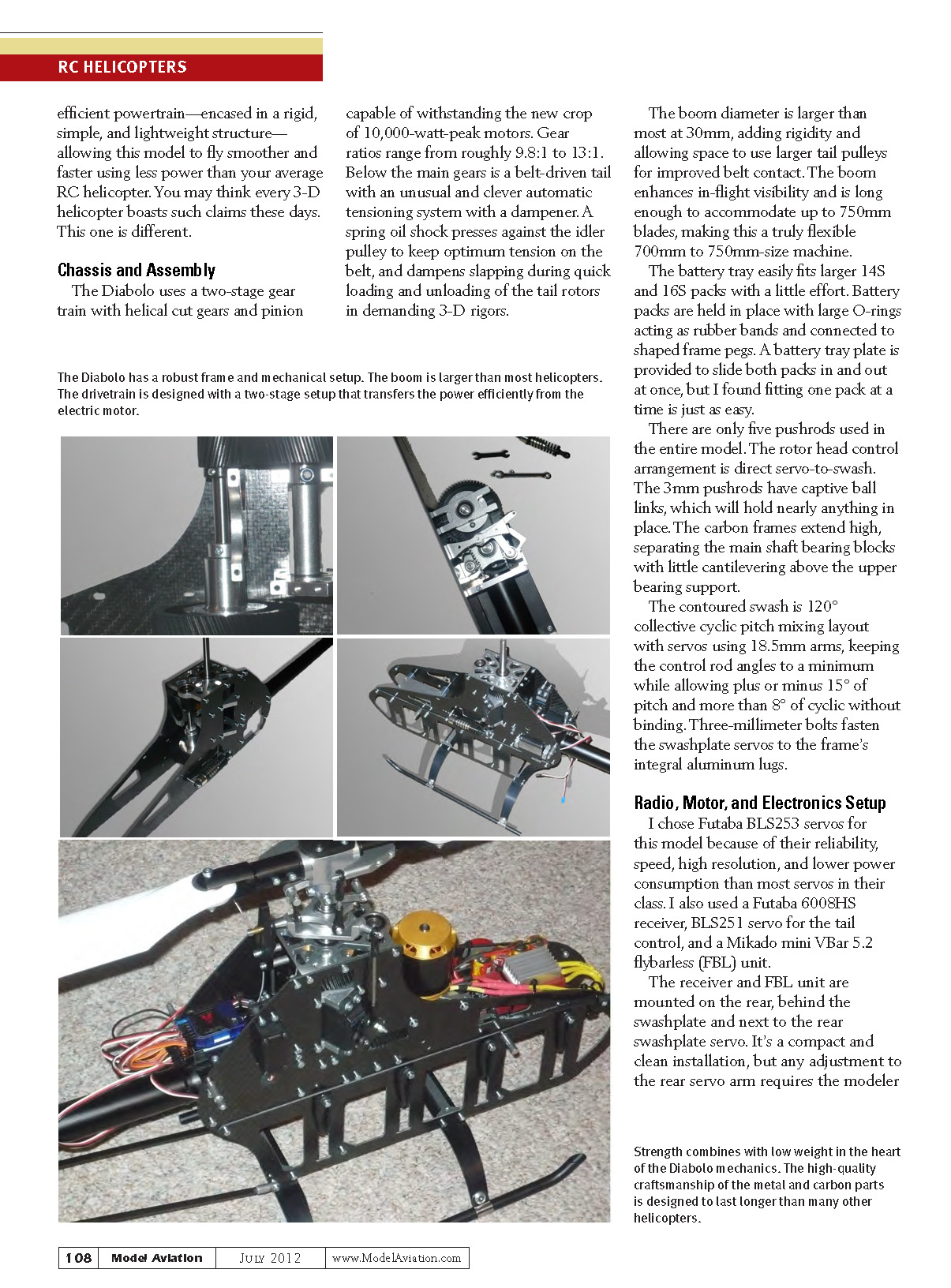
The Diabolo uses a two-stage gear train with helical-cut gears and a pinion capable of withstanding the new crop of 10,000-watt-peak motors. Gear ratios range from roughly 9.8:1 to 13:1. Below the main gears is a belt-driven tail with an unusual and clever automatic tensioning system with a dampener. A spring-oil shock presses against the idler pulley to keep optimum tension on the belt and dampens slapping during quick loading and unloading of the tail rotors in demanding 3-D rigors. The boom diameter is larger than most at 30 mm, adding rigidity and allowing space to use larger tail pulleys for improved belt contact. The boom enhances in-flight visibility and is long enough to accommodate up to 750 mm blades, making this a truly flexible 700–750 mm-size machine. The battery tray easily fits larger 14S and 16S packs with a little effort. Battery packs are held in place with large O-rings acting as rubber bands and connected to shaped frame pegs. A battery tray plate is provided to slide both packs in and out at once, but I found fitting one pack at a time is just as easy.
There are only five pushrods used in the entire model. The rotor head control arrangement is direct servo-to-swash. The 3 mm pushrods have captive ball links, which will hold nearly anything in place. The carbon frames extend high, separating the main shaft bearing blocks with little cantilevering above the upper bearing support. The contoured swash uses a 120° collective-cyclic pitch-mixing layout with servos using 18.5 mm arms, keeping the control rod angles to a minimum while allowing plus or minus 15° of pitch and more than 8° of cyclic without binding. Three-millimeter bolts fasten the swashplate servos to the frame’s integral aluminum lugs.
Radio, Motor, and Electronics Setup
I chose Futaba BLS253 servos for this model because of their reliability, speed, high resolution, and lower power consumption than most servos in their class. I also used a Futaba 6008HS receiver, a BLS251 servo for the tail control, and a Mikado mini VBar 5.2 flybarless (FBL) unit.
The receiver and FBL unit are mounted on the rear, behind the swashplate and next to the rear swashplate servo. It's a compact and clean installation, but any adjustment to the rear servo arm requires the modeler to remove the belt cover, undo the gyro mounting plate, or detach the swashplate autorotation bracket.
I had two motors lined up for propulsion: a Scorpion HK4035-500 (about 3,500 watts) for 3-D and sport flying, and a Xera 4530-500 capable of delivering steady 5,000 watts (10,000-watt peak) for demanding speed runs. The standard 19t pinion was a good pairing with these motors. When combined with a Kontronik 120A Jive ESC, it yielded a usable rotor rpm range of roughly 1,600 to 2,100.
A small, low-internal-resistance NiMH battery is used in parallel with the BEC, providing extra power when needed and a fail-safe in case of main battery or ESC malfunction. All flights reported here were done with the smaller Scorpion motor.
After the transmitter, ESC, and FBL unit were programmed, I fitted a set of Edge 693 FBL blades and walked out for a quick test hover in the backyard snow. The brief hover was uneventful and gave me an idea of which rates to try. After a safety inspection, I headed out for the big maiden flight.
Upon arriving at the field, I began receiving comments about the striking appearance of the Diabolo and the beautiful canopy graphics designed by Minicopter. Various friends were ready with cameras to capture the magic of the first flight.
Flying
Final preflight inspection completed and batteries connected, I spooled up, and up it went. One crowd comment dominated for the first two minutes: "This is the quietest, smoothest helicopter we ever heard." The model felt solid and light. I revved up to roughly 1,750 rpm and did a few passes at what I intended to be medium speed. The Diabolo began to reveal its character: slippery in the air. I upped the idle to 2, which at the time was approximately 1,875 rpm with plus or minus 12° of collective, and I let it stretch its legs. The speed of this helicopter is mind-blowing.
I have flown thousands of times at the Dayton (Ohio) Wingmasters field and have a good reference for speed. I knew this model was cruising at close to 100 mph, yet it made only a whisper.
Next, I tried some tic-tocks and rainbows with little collective input. Axial rolls and flips were accurate and centered. Gigantic high-speed loops were simple tasks for this helicopter.
For the second flight session, I tweaked the FBL unit and increased the rpm to 2,030, still limiting plus or minus 12° of collective. For the fourth and fifth flights, I asked a friend, who is an accomplished 3-D pilot, to put it through its paces. His immediate comments were about how effortless and fast it flew, even at 1,850 rpm doing piro-funnels and fast tumbling, rolling loops. It flew on rails. And then there was that "speed thing."
Summary
The Diabolo has the distinction of being a fast model, but it also performs any maneuver quietly and remarkably well. The lightweight model's efficient design sets the bar for future model helicopters.
MANUFACTURER
- Minicopter
- [email protected]
- www.minicopter.de/en
US DISTRIBUTOR
- Peak Aircraft
- (803) 701-0167
- www.peakaircraft.com
Transcribed from original scans by AI. Minor OCR errors may remain.

