



Park View: Model Airplane Engineering Jinx
Michael Ramsey [email protected]
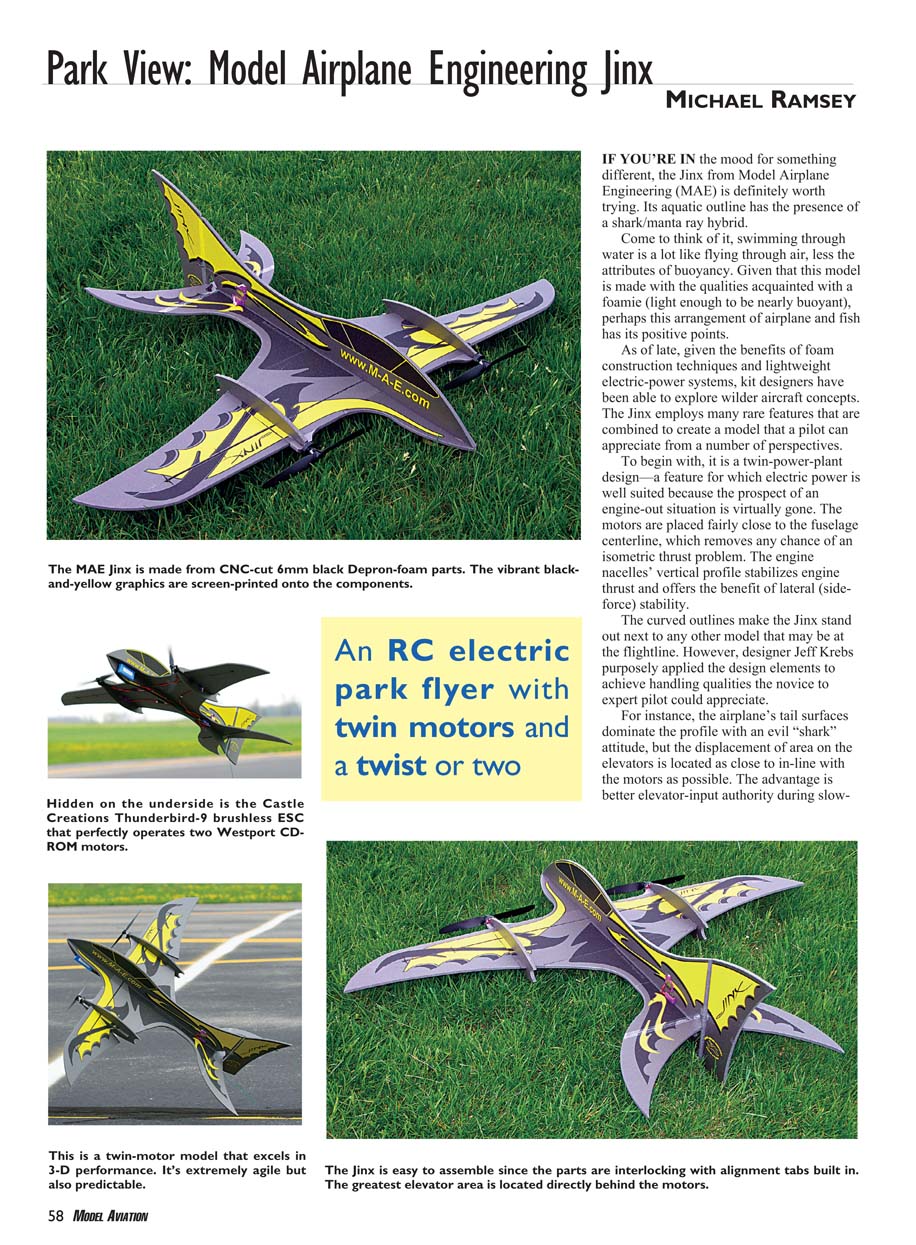
If you're in the mood for something different, the Jinx from Model Airplane Engineering (MAE) is definitely worth trying. Its aquatic outline has the presence of a shark/manta-ray hybrid. Come to think of it, swimming through water is a lot like flying through air, less the attributes of buoyancy. Given that this model is made with the qualities associated with a foamie (light enough to be nearly buoyant), perhaps this arrangement of airplane and fish has its positive points.
As of late, given the benefits of foam construction techniques and lightweight electric-power systems, kit designers have been able to explore wilder aircraft concepts. The Jinx employs many rare features that are combined to create a model that a pilot can appreciate from a number of perspectives.
To begin with, it is a twin-power-plant design — a feature for which electric power is well suited because the prospect of an engine-out situation is virtually gone. The motors are placed fairly close to the fuselage centerline, which removes any chance of an asymmetric-thrust problem. The engine nacelles' vertical profile stabilizes engine thrust and offers the benefit of lateral (side-force) stability.
The curved outlines make the Jinx stand out next to any other model that may be at the flightline. Designer Jeff Krebs purposely applied the design elements to achieve handling qualities the novice to expert pilot could appreciate.
For instance, the airplane's tail surfaces dominate the profile with an evil "shark" attitude, but the displacement of area on the elevators is located as close in line with the motors as possible. The advantage is better elevator-input authority during slow-speed (high-alpha) maneuvers. The vertical fin's dorsal design keeps the rudder powerfully effective even though it isn't directly in line with the propeller blast.
Observing the fuselage profile we see a cockpit canopy outline; lo and behold, it's not a fish after all. The enormous canopy's forward position promotes lateral stability, not only at high speed but also in knife-edge flight. In addition, the long nose offers a place in which to put the battery on this puffed-up — that's fish talk — empennage design.
Looking at the airplane from the top, you can see the manta-ray outline in the shape of the wings. The wide root area promotes lift for 3-D maneuvers while the narrower outboard wing sections employ this sport model design's "secret weapon." The wing sections outboard of the engine nacelles are designed as tiperons; for roll control the entire wingtips rotate around a carbon-fiber spar, offering outrageous roll-input authority.
Jinx on the Bench
This model is available direct from MAE as a stand-alone kit, packaged with "plug-and-fly" motors, or bundled with everything but the receiver. The company's web site is a one-stop shopping experience. I used all the accessories and equipment recommended by the manufacturer, and overall I'm extremely pleased with the outcome. Unless you have an overflowing parts drawer, you won't go wrong with a package purchase.
The Jinx has been engineered to a practical size; a one-piece model with a wingspan exceeding 40 inches is a pain to transport. With that in mind, the Jinx worked out to where it could use an economical set of brushless motors.
The Westport Design power plants are essentially CD-ROM motors built to suit electric-powered aircraft. The motors recommended for the Jinx have been wound with 20 turns of 25-gauge wire in the WYE parallel termination. The motors don't need a gearbox since they're outrunners, and the way my set was packaged, with the lead wiring in place, all that was left for me to do was connect the speed control. That's right; a single Thunderbird-9 ESC is effectively controlling both motors on my Jinx.
The builder has the option of employing a two- or three-cell Li-Poly battery setup. To keep the Westport motors within their 12-amp output range, GWS direct-drive propellers of 8 and 7 inches respectively are recommended. I fly many two-cell systems in this foamie class. I test-flew this model with that setup and experienced satisfactory performance. I tried the three-cell system too because it was reported to give "zippier" performance (which it did). It's nice to have options.
The kit is neatly packed by hand. The CNC router-cut parts are taped to a rigid cardboard sheet so the screen-printed parts are less likely to be damaged. The router leaves fuzzy edges on the foam, so I dressed the outer edges of the parts using 180-grit sandpaper and left the tab-and-notch glue-joint areas as provided.
As instructed, I used UHU Creative cement (also available from MAE) to assemble the foam parts. This adhesive works like rubber cement: adhesive is evenly applied to the contact areas and then allowed a few minutes to tack-dry before permanently joining them. The process takes a bit longer than assembly methods using foam-safe cyanoacrylate. The benefit of the UHU is that it's as flexible as the Depron foam when cured, whereas cyanoacrylate joints are brittle.
Along with the four-page illustrated instruction manual provided, the MAE web page has full-color photos of key areas to complement the building process. I was grateful to find those photos because the directions regarding the tiperons were a bit gray (pun intended; the illustrations in the manual are in grayscale) to me. The detailed photos cleared up all my concerns, and the build sped along. I had the Jinx ready to fly after roughly three relaxing evenings of work.
I deviated from the instructions only during the horizontal fuselage and wing construction. While this assembly was still flat I advanced to the elevator installation and hinged it to the stabilizer. I predicted that if I installed the elevator after the vertical portions of the fuselage were attached, hinging would be awkward to complete neatly.
The Jinx was a snap to build straight. Because I ordered the recommended radio accessories with the kit, everything was a drop fit into the precut locations. I decorated the laser-cut 1/32" plywood control horns with black marker so they matched the black color scheme; in addition, it gives them the high-tech look of carbon fiber.
Low-temperature hot glue holds the servos in place. Velcro (included) is used to mount the receiver in the tail, and the battery is placed as far forward as possible. Just enough music wire is provided to make straight pushrods. My pushrods were assembled as two pieces joined with heat-shrink tubing and cyanoacrylate.
With the servos so close to the control surfaces, there's almost no flex in the control linkage. To get the 45°–70° of control throw permitted in the ailerons, it might be necessary to use the extra-long servo arms made by Du-Bro (items 930 through 933). I used the longest arm included with the Bluebird 306 servos.
Low rate control was programmed with half the maximum available throw. On high rates the elevator and rudder deflect approximately 50° each. The tiperons rotate roughly 35° (which is plenty for a blinding roll rate). Exponential was programmed into the high rates to soften the control-stick feel around neutral. The recommended 70% setting seemed appropriate and proved to work well.
Jinx in the Air
The model's lack of undercarriage requires a hand launch and a soft place to land. I first flew it with the two-cell Li-Poly battery and 8 x 4 propellers. An underhand toss was all it needed for a safe launch. More than enough power was available to accelerate straight up from a hovering standstill. The Jinx's WOT (wide-open-throttle) speed was comfortable with half throttle used for cruising and full throttle for pull-ups and emergency rescue (read: obstacle avoidance).
I have to admit that the Jinx is sensitive to control-surface inputs. Some might call it "twitchy"; I prefer to use the word "capable" when describing its flying qualities. This is a capable 3-D flier—probably the most capable twin-motor aircraft I've ever flown. Its agility quickly builds pilot confidence, encouraging you to fly the aircraft into tumbling maneuvers that seem to defy gravity and imagination.
Almost the only handicap the Jinx has is its rudder effectiveness while in a hover. The propeller blast just can't touch the rudder. I could hover the Jinx after some practice, but it reminded me of what a fish looks like when it’s pulled from the water, with its tail (or rudder in this case) flapping wildly behind.
If rolling fast is your thing, the Jinx will never fail to please. I thought my Ultra Stick with its quadruple-aileron feature had a fast roll rate; the Jinx is blinding. Of course, the aileron response and roll rate are a product of whatever the model's airspeed is at the time.
The most crowd-pleasing maneuver I’ve done so far is a stunt called the Blender Bender (which I first saw on the MAE web site video page). After climbing to altitude, point the Jinx straight down and pull the throttle back to idle. With full aileron input, the Jinx appears to drill itself down through the air. As the ground closes in and the roll rate seems to be the most intense, quickly apply full down-elevator and rudder. The Jinx stops so fast, it’s almost as if it hits an invisible floor. Finally, with the controls held at the limits, smoothly add throttle back in so the Jinx can perform rolling tumbles in a circle with no further loss of altitude.
Of the two- and three-cell power configurations, I’m happier flying the Jinx with the faster 11.1-volt battery. The extra zip the motors give when turning at higher speeds picks up the pace for air-show antics. The Jinx will hover better using larger 8 x 4 propellers; the larger thrust area improves control effectiveness. So for slow-speed maneuvers (Harriers and the like), the two-cell power configuration is the better choice.
One other optional setup to play with is flaperon control. With each aileron connected on separate channels, they can be mixed to function as flaps. Not that the Jinx needs this input to slow down or land, but the fun part is mixing the flap control in with the elevator. When you slave the flaps to the elevator, often regarded as the air-brake function, whenever elevator is used an allotted amount of flap moves with them. The tiperons rotate back when up-elevator is applied and forward with down-elevator. I can turn the mix on and off, only using the function to perform tight loops, tumbles, and 50°–85° high-alpha passes.
The Jinx is a blast! It's easy to gather a large collection of foamies quickly. As much fun as they can be to play with, many of them fly alike. An active RC pilot looks for something different. The Jinx is distinctive in looks and performance, including a bag of tricks that won’t fail to surprise.
Manufacturer/Distributor
- Model Airplane Engineering
- 5001 Bainbridge Ct.
- Lilburn, GA 30047
- (770) 925-8326
- www.m-a-e.com
Products Used in Review
- Optic 6 transmitter, Micro O5S receiver — Hitec RCD
- www.hitecrcd.com
- Thunderbird-9 ESC — Castle Creations
- www.castlecreations.com
Transcribed from original scans by AI. Minor OCR errors may remain.

