
Twin Turbo Goes PROPORTIONAL
Sergio Zigras
John Worth calls the Twin Turbo system "the biggest bargain in RC," and he is absolutely right. Granted, it has a short operating range and limitations for model airplanes (probably because it was intended for small indoor RC blimps, etc.), but it is an RC system with enormous room for experimentation.
Some creative minds modified the existing design and made it more useful in one way or another. I decided to have some fun with it as well.
I converted the original on/off concept to a pseudo-digital-proportional system. The end result is a system with the original twin motors controlled by a digital speed controller/mixer, producing a servoless RC system. The brain work is done by a Microchip tiny microcontroller (uC), the size of a lentil bean, plus some receiver modifications.
Operation
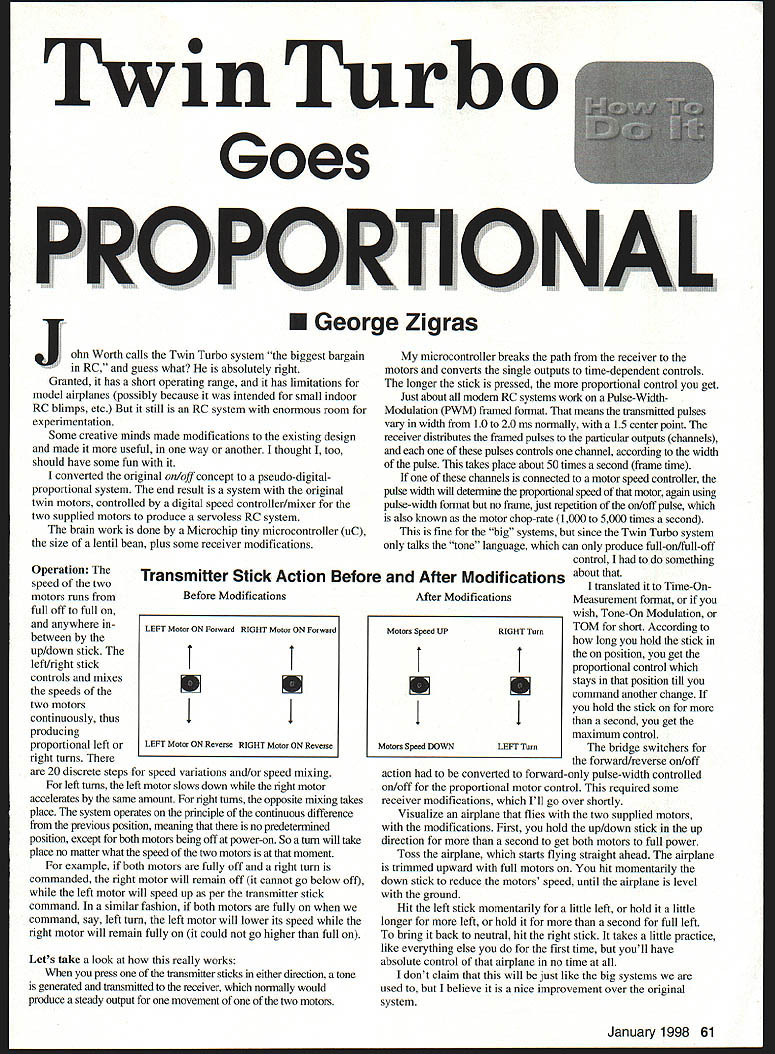
- The speed of the two motors runs from full off to full on, and anywhere in between, controlled by the up/down stick.
- The left/right stick continuously controls and mixes the speeds of the two motors, producing proportional left or right turns.
- There are 20 discrete steps for speed variation and mixing.
For left turns, the left motor slows while the right motor accelerates by the same amount. For right turns, the opposite mixing takes place. The system operates on the principle of continuous difference from the previous position—there is no predetermined position except that both motors are off at power-on. So a turn will take place no matter what the current motor speeds are.
Examples:
- If both motors are fully off and a right turn is commanded, the right motor will remain off (it cannot go below off), while the left motor will speed up according to the transmitter stick command.
- If both motors are fully on and a left turn is commanded, the left motor will lower its speed while the right motor remains fully on (it cannot go higher than full on).
How it works:
- When you press one of the transmitter sticks, a tone is generated and transmitted to the receiver. Normally this would produce a steady output for one movement.
- The microcontroller breaks the path from the receiver to the motors and converts the single outputs to time-dependent controls. The longer the stick is pressed, the more proportional control you get.
- Most RC systems use a pulse-width-modulation (PWM) framed format. Transmitted pulses vary in width from about 1.0 to 2.0 ms, with a 1.5 ms center point. The receiver distributes framed pulses to channels at about 50 frames per second.
- For motor speed controllers, pulse width determines proportional speed, but in motor controllers this is repeated as an on/off pulse at the motor chop rate (about 1,000 to 5,000 times a second).
- The Twin Turbo system only speaks the "tone" language, which normally produces full-on/full-off control. I translated it to a Time-On-Measurement format—Tone-On Modulation (TOM). According to how long you hold the stick, you get proportional control that stays until another command. Holding the stick more than a second yields maximum control.
The bridge switchers for forward/reverse on/off have to be converted to forward-only pulse-width-controlled on/off for proportional motor control; this requires receiver modifications described below.
Practical flying example:
- Hold the up/down stick up for more than a second to get both motors to full power.
- Toss the airplane; it starts flying straight ahead. Trim it upward with full motors on.
- Tap the down stick momentarily to reduce motor speed until the airplane is level.
- Tap or hold the left stick for incremental to full left; hit the right stick to return toward neutral.
- It takes practice, but you'll have absolute control quickly. It’s not identical to full-featured proportional systems, but it’s a significant improvement over the original Twin Turbo.
Design details
- The PIC12C508 (8-pin, 8-bit microcontroller) from Microchip handles the processing. It continuously monitors the four signals from the receiver for speed and turn commands and outputs pulses to the two motors about 1,000 times a second.
- The uC uses an internal resistor/capacitor oscillator (no crystal or separate RC network required). It’s not as accurate as a crystal but is adequate here.
- The outputs of the existing receiver device (marked KA2311) are open-collector, so they never go high unless pulled up with a pull-up resistor. The uC has weak pull-ups on three of the four required pins, so only one external pull-up resistor was added.
Receiver modifications
These modifications involve surface-mount technology (SMT) work and should be done only by those experienced with SMT soldering.
Required steps:
- Remove the receiver and the two motors from the original plastic housing.
- Replace the original propellers with the more efficient props sold by John Worth.
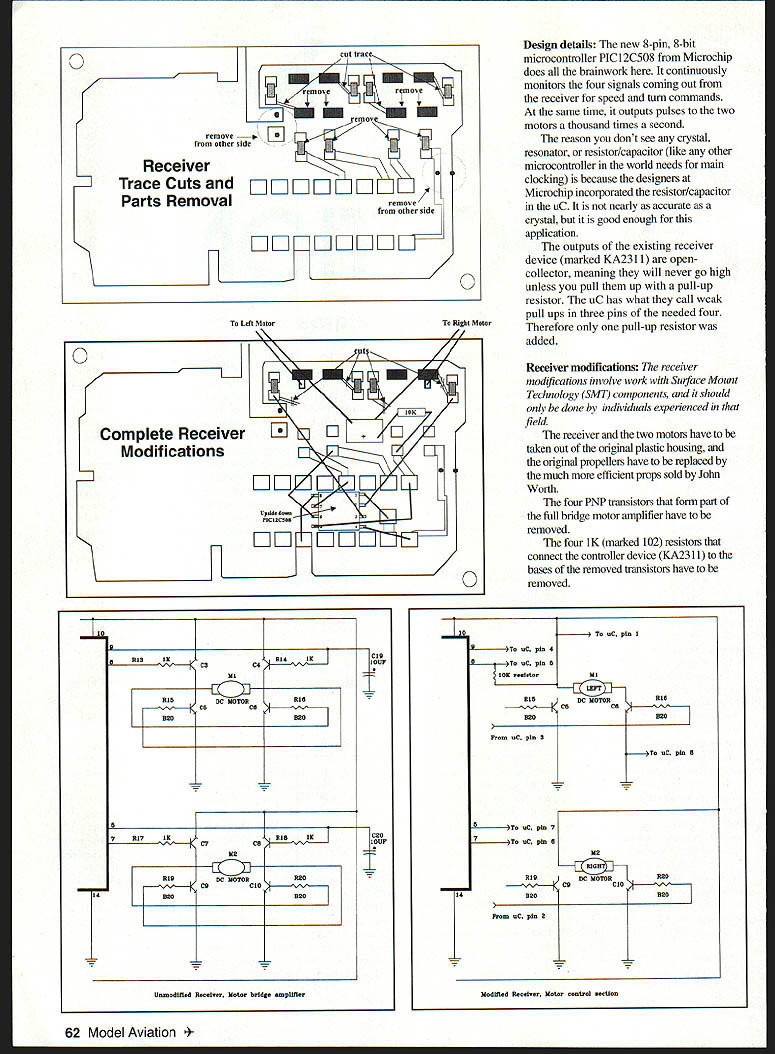
- Remove the four PNP transistors that are part of the full-bridge motor amplifier.
- Remove the four 1K resistors (marked "102") that connect the KA2311 controller to the bases of the removed transistors.
- Remove the two capacitors labeled C19 and C20 from the main board.
- Make four PCB cuts as indicated in the modification plan.
- Add one 10K pull-up resistor.
Wiring changes:
- The four outputs from the KA2311 that previously went to the PNP transistors now connect to the added microcontroller (PIC12C508); these serve as the uC inputs for the up, down, left, and right commands.
- Two outputs from the uC connect to the bases of the remaining NPN transistors via 820 ohm resistors (marked "822")—one output per transistor/motor.
Notes:
- Two spare transistors on the board are unused in this design. You could parallel transistors per motor for increased current capacity and lower voltage drop, but be mindful of power dissipation, increased noise, and the uC voltage required to drive multiple transistors per pin.
Transmitter stick control
The relationship between transmitter stick activation and the produced control is linear.
Servo variation
Using the same TOM principle, I programmed the uC for proportional control of two standard servos instead of the two motors. If there is enough interest, I will present a follow-up article on that design.
Parts and availability
- Modified propellers: available from John Worth for $4 each, postpaid.
- John Worth can also supply Twin Turbo systems with accessories.
John Worth 4326 Andes Drive Fairfax, VA 22030 Phone/fax: (703) 273-0607
- The preprogrammed microcontroller alone, or the complete receiver with modifications, is available from the author:
- Preprogrammed microcontroller (PIC12C508): $10, postpaid.
- Complete modified receiver: $25, postpaid.
If sending a receiver for modification, please ensure the receiver is removed from its plastic enclosure, is in good working condition, and has both motors attached.
Sergio Zigras 171 Arundel Rd Paramus, NJ 07652 (201) 444-9864
Transcribed from original scans by AI. Minor OCR errors may remain.

